在自動碼垛流程中,選擇合適的機器人抓手是定制碼垛解決方案的關鍵步驟之一。
你可能有不同的特定需求,比如大型貨物、易碎品或危險材料,幾乎每種操作都有適用的碼垛抓手。
為什么要重視碼垛抓手?
選擇正確的抓手可能會讓碼垛過程順利高效,也可能會使過程出現貨物損壞、裝載不穩定以及其他問題。抓手需要能夠可靠地抓取、握住并放置你要碼垛的特定產品,且不會造成任何損害。

選擇碼垛抓手時需考慮的一些關鍵因素包括:
不同碼垛任務適用不同的抓手
有多種不同類型的抓手。每種類型適用于不同的工作,但大多數在碼垛過程中都起著重要作用。

用于重型任務的機械抓手
機械抓手利用夾爪或手指物理抓取產品。它們非常適合處理剛性、均勻的物品,比如箱子或板條箱。機械抓手能提供較大的抓力,常用于重型碼垛。

用于光滑表面的真空吸盤
真空抓手利用吸盤通過創建真空密封來提升產品。它們非常適合處理光滑、無孔的表面,比如塑料或玻璃。真空抓手擅長抓取大型、扁平的物品,并且能夠對易碎品進行精細操作。
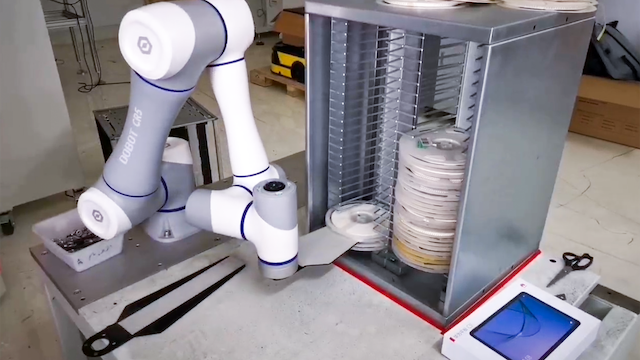
Dobot 協作機器人為碼垛提供單吸盤和雙吸盤真空抓手選項。單吸盤真空抓手每分鐘可達到 8 件的抓取速度,而雙吸盤真空抓手每分鐘可達到 13 件的抓取速度。多個吸盤使抓手能夠穩固地提升更大或形狀更不規則的物品。

用于金屬物體的磁性抓手
磁性抓手利用電磁力提升含鐵金屬產品。它們通常用于碼垛鋼卷、金屬板或其他重金屬物品。
兼容性廣泛的氣動抓手
氣動抓手利用壓縮空氣來打開和關閉其抓手手指。它們響應速度快,可以處理各種尺寸和重量的零件。氣動抓手是碼垛多種產品的熱門選擇。
用于增強夾緊的叉式抓手
叉式抓手是碼垛過程中一種通用的選擇。它們叉狀的 “手指” 設計為可在托盤下方滑動,使其能夠穩固地抓取和提升整個碼垛貨物。這使得叉式抓手非常適合諸如運輸整托盤堆疊之類的任務。
除了搬運托盤,叉式抓手在其他碼垛應用中也能發揮重要作用。例如,它們可以用來夾緊并撐開袋子或箱子,在裝載產品時幫助保持正確的對齊。在卸垛過程中,叉式抓手可以在卸載內容物時穩定容器。
雖然叉式抓手通常與重型工業機器人搭配使用,但它們也可以與協作機器人(協作式機器人)集成,為碼垛設置增添這種夾緊能力。
用于 “軟” 物體的精密抓手
并非所有碼垛工作都涉及大型、堅固的物品。有些產品由于其小尺寸、易碎性或需要在托盤上精確放置,需要更精細的操作。
這就是精密抓手發揮作用的地方。這些先進的抓手利用復雜的傳感器和控制系統來提供極其準確和可重復的零件抓取和放置。這使得它們非常適合處理易碎物品或排列需要嚴格公差的復雜托盤圖案。
精密抓手可以使用柔軟的、有襯墊的夾爪或多個吸盤來輕柔地抓取和提升易碎或不規則形狀的產品。這種輕柔的方法有助于防止在碼垛過程中造成損壞。
專用抓手
也有針對獨特碼垛需求的專用抓手設計,比如:
最終,“最佳” 碼垛抓手將取決于你操作的具體要求。仔細評估你的碼垛需求并與有經驗的自動化供應商合作,可以幫助你選擇最佳的抓手解決方案。




 汽車制造
汽車制造
 3C電子
3C電子
 金屬加工
金屬加工
 新零售
新零售
 食品飲料
食品飲料
 化工
化工
 醫療手術
醫療手術
 半導體
半導體
 科研
科研
 教育
教育
 自動化焊接
自動化焊接
 碼垛
碼垛
 上下料
上下料
 無序分揀
無序分揀
.svg) 點涂膠
點涂膠
 視覺檢測
視覺檢測
 裝配
裝配
 搬運
搬運
 PCB 插件
PCB 插件
 打磨拋光
打磨拋光
 螺絲鎖付
螺絲鎖付