隨著人工智能在不同領(lǐng)域和行業(yè)占據(jù)優(yōu)勢,人工智能機(jī)器人已成為一種新技術(shù),它不僅僅依靠指尖就能對(duì)移動(dòng)物體進(jìn)行高效推理。
人們期望人工智能操控的機(jī)器人在日常生活中能為人類提供便利,比如照顧嬰兒、做家務(wù)、清理下水道等等。
令人驚訝的是,人工智能操控的機(jī)器人已成功地被用于處理各種各樣的人類任務(wù),比如煎炒并端上一份蝦、打開雙門壁柜來存放沉重的烹飪鍋、呼叫并進(jìn)入電梯,以及用廚房水龍頭輕輕沖洗用過的平底鍋。
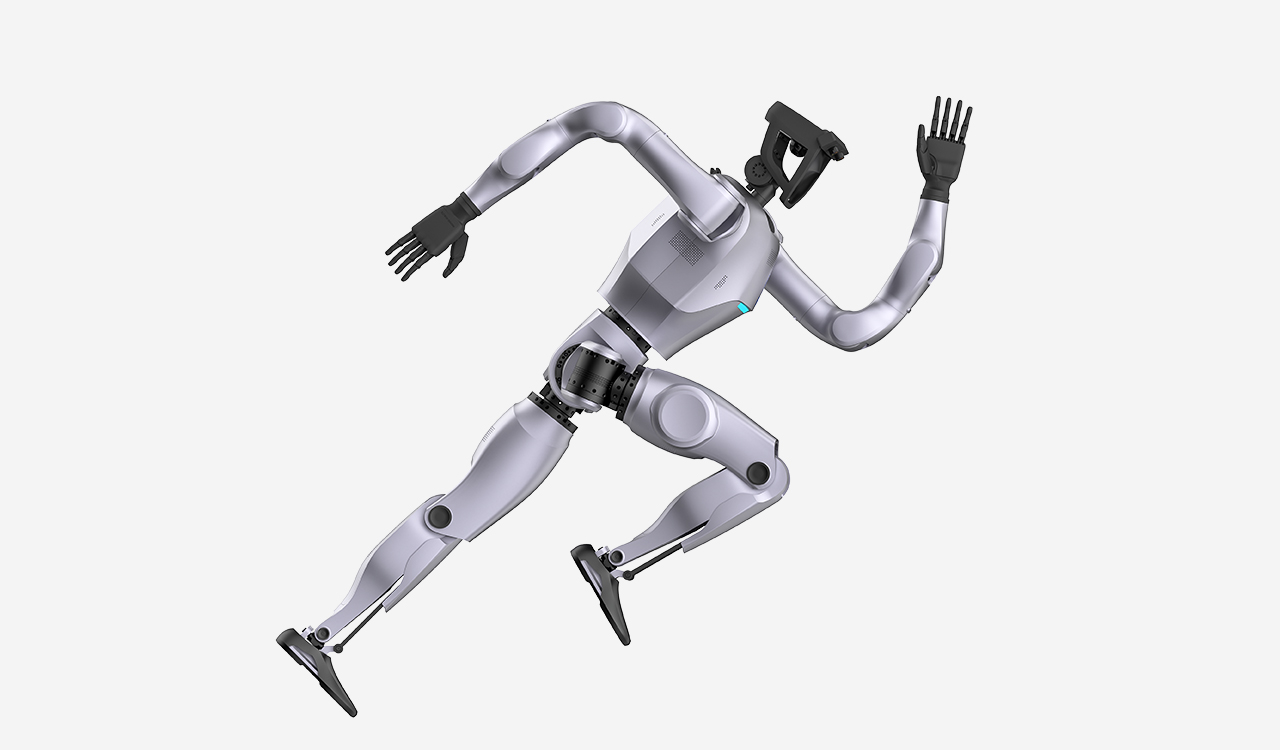
為什么是人工智能機(jī)器人,而不是人形機(jī)器人?
人形機(jī)器人被設(shè)計(jì)用來模仿人體的外觀和動(dòng)作,長期以來一直是機(jī)器人技術(shù)研發(fā)的重點(diǎn)。然而,隨著人工智能技術(shù)的進(jìn)步,一種新型機(jī)器人正在興起 —— 人工智能操控的機(jī)器人。這些機(jī)器人并非被設(shè)計(jì)成看起來像人類,而是為了利用人工智能的力量高效地與周圍環(huán)境中的物體進(jìn)行交互和操控。
人工智能操控的機(jī)器人相對(duì)于人形機(jī)器人的一個(gè)關(guān)鍵優(yōu)勢是它們能夠更高效、更有效地對(duì)物體進(jìn)行推理和交互。人形機(jī)器人通常被設(shè)計(jì)為模仿人類的身體能力,這可能會(huì)限制它們處理某些需要靈活性、力量或超出人類能力范圍的任務(wù)的能力。
相比之下,人工智能操控的機(jī)器人可以被設(shè)計(jì)帶有專門的附屬物、傳感器和控制系統(tǒng),這使它們能夠精確且高效地處理各種各樣的物體和任務(wù)。它們可以使用先進(jìn)的計(jì)算機(jī)視覺和物體識(shí)別算法來識(shí)別并與物體交互,還可以使用機(jī)器學(xué)習(xí)技術(shù)隨著時(shí)間的推移不斷提高它們的性能。
為什么要探索讓人工智能機(jī)器人用全身來操控物體?
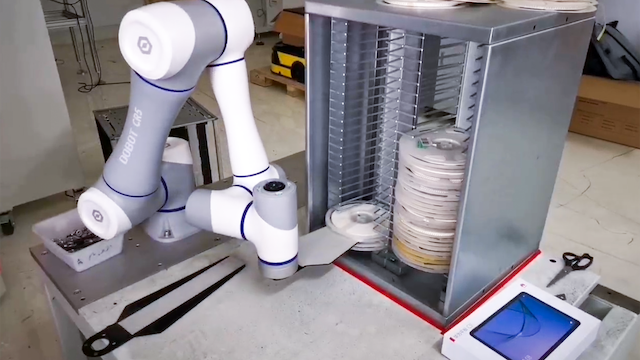
想象一下你想把一個(gè)又大又重的箱子搬到樓上。你可以張開手指,用雙手抬起箱子,然后把它放在前臂上,靠在胸前以保持平衡,并用全身來移動(dòng)箱子。或者,面對(duì)一大堆極其臟的盤子,長時(shí)間浸泡和使用洗滌劑會(huì)傷害人類的手。機(jī)器人可以替代并模仿人類行為來處理困難的任務(wù)。
通過使用全身,人工智能操控的機(jī)器人可以表現(xiàn)出更高的靈活性、穩(wěn)定性和適應(yīng)性,使它們能夠更精確、更可控地處理更廣泛的任務(wù)和物體,同時(shí)也降低了受損的風(fēng)險(xiǎn)。這使它們非常適合復(fù)雜的、高強(qiáng)度的或精細(xì)的操控任務(wù)。

模仿學(xué)習(xí),一種人類行為克隆
模仿學(xué)習(xí)已被有效地用于接觸豐富的操控規(guī)劃,在這種規(guī)劃中機(jī)器人試圖學(xué)習(xí)移動(dòng)物體的最佳方式。然而,機(jī)器人必須考慮的大量潛在接觸點(diǎn)使得這種試錯(cuò)方法在計(jì)算上非常密集。
研究人員發(fā)現(xiàn)一種名為 “平滑” 的技術(shù)能使強(qiáng)化學(xué)習(xí)表現(xiàn)得非常出色。平滑會(huì)平均掉許多不重要的中間決策,顯著降低問題的維度。
通過應(yīng)用平滑,強(qiáng)化學(xué)習(xí)算法可以更有效地探索狀態(tài) - 行動(dòng)空間并學(xué)習(xí)最佳操控策略。這種模仿學(xué)習(xí)和平滑的結(jié)合是一項(xiàng)關(guān)鍵突破,使人工智能驅(qū)動(dòng)的機(jī)器人能夠在需要靈活的全身交互的復(fù)雜物理任務(wù)中協(xié)助人類。
一種獲勝的組合方法
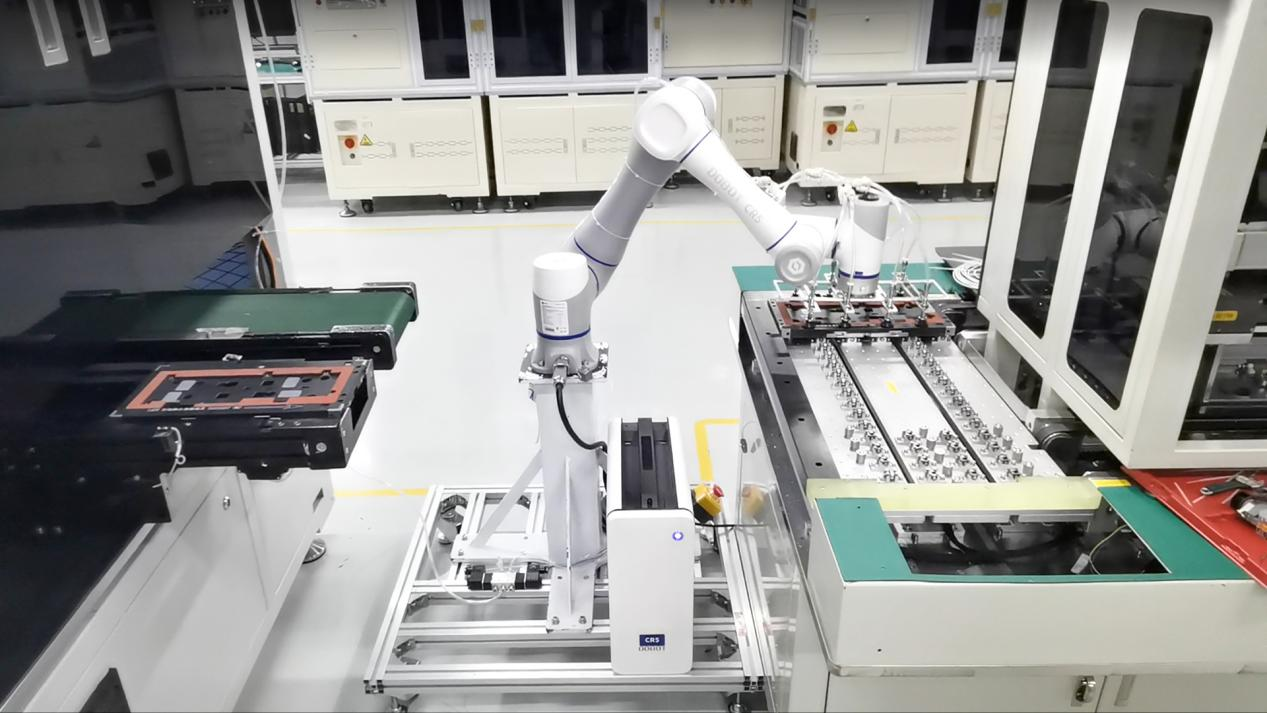
研究人員發(fā)現(xiàn),雖然 “平滑” 簡化了決策過程,但搜索剩余選項(xiàng)仍然具有挑戰(zhàn)性。所以他們將自己的模型與一種高效的搜索算法相結(jié)合,將在筆記本電腦上的計(jì)算時(shí)間減少到大約 1 分鐘。在模擬和真實(shí)機(jī)械臂上的測試表明,他們基于模型的方法與強(qiáng)化學(xué)習(xí)性能相當(dāng),但速度要快得多。

這種綜合方法展示了人工智能驅(qū)動(dòng)的機(jī)器人在復(fù)雜物理任務(wù)中與人類無縫協(xié)作的潛力。隨著機(jī)器人技術(shù)的進(jìn)步,我們將會(huì)看到更有能力的系統(tǒng)在廣泛的現(xiàn)實(shí)應(yīng)用中提供幫助,也許成為一個(gè)高效的家政人員來取代人類很快就會(huì)成為現(xiàn)實(shí)。




 汽車制造
汽車制造
 3C電子
3C電子
 金屬加工
金屬加工
 新零售
新零售
 食品飲料
食品飲料
 化工
化工
 醫(yī)療手術(shù)
醫(yī)療手術(shù)
 半導(dǎo)體
半導(dǎo)體
 科研
科研
 教育
教育
 自動(dòng)化焊接
自動(dòng)化焊接
 碼垛
碼垛
 上下料
上下料
 無序分揀
無序分揀
.svg) 點(diǎn)涂膠
點(diǎn)涂膠
 視覺檢測
視覺檢測
 裝配
裝配
 搬運(yùn)
搬運(yùn)
 PCB 插件
PCB 插件
 打磨拋光
打磨拋光
 螺絲鎖付
螺絲鎖付